Python homokinetische Antriebe
Verwenden Sie unser praktisches Tool, um das richtige Python-Drive-Modell auszuwählen.
Öffnen Sie hier das Calculation Correct Python-Drive-Modell.
- Wählen Sie den Rumpftyp aus;
- Geben Sie die Anzahl der PS und die Drehzahl des Motors ein;
- Geben Sie das Übersetzungsverhältnis des Getriebes ein;
- Und wählen Sie den Durchmesser der Propellerwelle.
Danach wird das Python-Drive-Modell empfohlen. Natürlich können Sie uns jederzeit kontaktieren.
Sie finden weitere Informationen zum Python-Laufwerk unten auf dieser Seite.
-

Python drive P1025-G 800Pk 9810Nm (2)
-

Python drive P1025-L 750 Pk 9807Nm (2)
-

Python drive P110-S 135Pk 1080Nm (2)
-

Python drive P110-T 190Pk 1370Nm (3)
-

Python drive P140-T 190Pk 1370Nm (2)
-

Python drive P1500-G 950Pk 14715Nm (2)
-

Python drive P200-Q 250Pk 1960Nm (2)
-

Python drive P200-T 240Pk 1960Nm (2)
-

Python drive P200-W 275Pk 1960Nm (2)
-

Python drive P30-R 50Pk 294Nm (2)
-

Python drive P501-L 500Pk 4900Nm (2)
-
Python drive P501-Q 300 Pk 4900 Nm (2)
-

Python drive P501-W 400Pk 4900Nm (2)
-

Python drive P60-B 70Pk 588Nm (2)
-

Python drive P60-K 70Pk 588Nm (2)
-

Python drive P755-L 600PS 7355Nm (2)
-

Python drive P80-M 105Pk 785Nm (3)
-

Python drive P80-S 130Pk 785Nm (2)
Was ist ein Python-Drive?
Yachten, Schaluppen und Arbeitsschiffe funktionieren optimal, wenn sie mit einem Python-Drive ausgestattet sind. Dieses komplette Antriebssystem für Schiffe aller Formen und Größen erhöht Ihr Bootsvergnügen erheblich. Sie müssen Ihren Motor nicht mehr hin und wieder auf der Kardanwelle ausrichten und unerwünschte axiale Antriebsrückwirkungen zwischen Motor und Kardanwelle treten nicht auf. Deshalb erleben Sie einen vibrationsfreien Antrieb zwischen 10 und 1000 PS! Sie können unten mehr darüber lesen, wie der Python-Drive funktioniert.
Wie berechne ich die Wellenlänge?
Es ist üblich, dass die Propellerwelle und die Schiffsgetriebewelle nicht parallel zueinander sind – siehe Zeichnung unten.
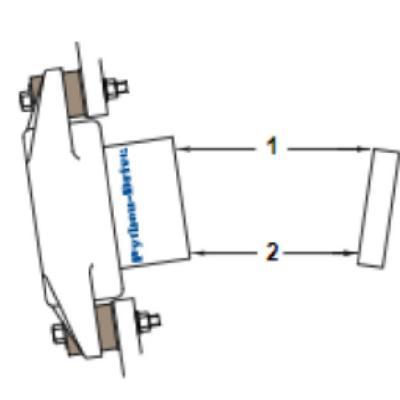
In diesem Fall gibt es einen minimalen und einen maximalen Abstand zwischen den beiden Teilen. Messen Sie beide und verwenden Sie den Durchschnitt der Abstände als Ausgangspunkt für die Achslänge. Bemerken Sie auch eine Diskrepanz im Abstand zwischen der linken und rechten Seite der Ausrichtung? Messen Sie das dann auch und verwenden Sie den Durchschnitt beider Ergebnisse. Idealerweise schließen beide Gleichlaufgelenke einen mehr oder weniger gleichen Winkel ein.
In welchem Winkel kann ich den Python-Drive installieren?
Bei einem homokinetischen Gelenksystem wie dem Python-Drive ist ein Winkel von 0º nicht sinnvoll. Die Kugeln rollen dann nicht hin und her und werden daher nicht geschmiert. Die Druckstellen im Kugellauf führen dann zu Materialermüdung und verursachen Lochfraß und Überlastung. Daher wird ein Mindestwinkel von 1,5º empfohlen.
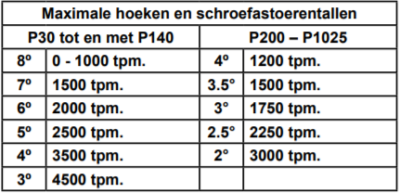
In der obigen Übersicht sehen Sie genau, wie groß der Winkel pro Homokinet-Gelenk im Vergleich zur Geschwindigkeit sein darf. Der maximale Winkelunterschied pro Homokinet-Gelenk darf maximal 8º pro Seite für P30 bis P140 betragen, also insgesamt 16º und maximal 8º insgesamt für P200 bis P1025.
Welche Python-Drive benötige ich?
Das hängt von mehreren Faktoren ab. Denken Sie an die Art des Rumpfes, aber auch an die Art des Schiffes: Für eine Freizeityacht benötigen Sie ein anderes Modell als für ein kommerzielles Binnenschiff. Sie müssen auch die PS-Zahl und Höchstdrehzahl Ihres Motors sowie die Übersetzung Ihres Getriebes kennen.
Kennen Sie all diese Daten? Dann wird es einfach! Alles, was Sie tun müssen, ist es einzugeben in unser praktisches Python-Drive-Berechnungstool um die gewünschten Informationen zu erhalten, anstatt selbst alle möglichen komplizierten Berechnungen anzustellen. Dies gibt Ihnen die Leistung Ihres Motors und das Drehmoment in Newtonmetern (Nm) an. Anhand dieser Zahlen können Sie ganz einfach einen Python-Drive auswählen, das diese Anforderungen erfüllt.
Können Sie es nicht herausfinden? Nehmen Sie dann Kontakt mit uns auf oder fahr mal vorbei wenn Sie in der Gegend sind. Aber bitte nach Vereinbarung per Mail oder Telefon. Wir können Ihnen alles über die Funktionsweise des Python-Drives und die Eignung pro Modell für Ihr Schiff erklären.